Cotiza con MCB tu Inversor de frecuencia al Mejor Precio
Adquiere el inversor de frecuencia ideal con MCB
¿Buscas un inversor de frecuencia trifásico que se adapte a tu motor y a tu presupuesto? Contáctanos y recibe en minutos una cotización personalizada de nuestro variador de velocidad al mejor precio, con entrega inmediata y soporte técnico en CDMX, Monterrey, Torreón, Mérida, Villahermosa y Hermosillo.
En MCB puedes encontrar todos los tipos de drivers para cualquier aplicación que necesites, con diferentes características que se acomodan a todas tus necesidades. Si desean conocer más detalles sobre este u otros productos.

Cotiza hoy mismo tu Motor Eléctrico
Ya sea que necesites un solo equipo o una solución completa para tu línea de producción, en MCB te ayudamos a encontrar el motor eléctrico más adecuado para tus requerimientos. Contáctanos por teléfono, correo o WhatsApp para recibir una cotización sin compromiso:
Un inversor de frecuencia o variador de velocidad es un dispositivo electrónico que se utiliza para controlar la velocidad de rotación (revoluciones por minuto o RPM) de los motores eléctricos de inducción de corriente alterna. A los inversores de frecuencia se les conoce también como Variadores de Frecuencia, Drives o VFD.
En aplicaciones industriales es común emplear el variador de frecuencia trifásico, ya que soporta mayores cargas y ofrece mejor eficiencia energética que sus equivalentes monofásicos.
¿Cómo se define la velocidad de un inversor?
Los motores eléctricos de corriente alterna tienen una velocidad definida fija que depende del número de polos y de la frecuencia de la corriente eléctrica que se le suministra al motor; que convierte la energía eléctrica en energía mecánica, o movimiento, al rotar gracias al campo magnético inducido en él.
Un motor de 4 polos únicamente puede girar a 1,800 revoluciones por minuto cuando la frecuencia de la corriente eléctrica es de 60 Hz (ciclos por segundo). En México, como en Estados Unidos y otros países americanos, se utiliza corriente de 60Hz, mientras que en Europa se utiliza corriente de 50Hz.
Modificar la velocidad de frecuencia
Esta frecuencia no se puede modificar, pues la suministra de manera estandarizada la compañía generadora de energía eléctrica. El número de polos del motor eléctrico no se puede modificar sin alterar el diseño de este, pues es el embobinado del motor.
Cuando queremos modificar la velocidad de un motor eléctrico utilizamos un inversor de frecuencia. Este, recibe el voltaje suministrado y modifica la frecuencia, o ciclos, para variar la velocidad del motor de acuerdo con la siguiente función:
RPM= 120 × f / p
Donde RPM = Revoluciones por minuto; f = Frecuencia de suministro, Hz; p = número de polos del motor
Sustituyendo, nos queda: 1800 = (120 × 60) / 4. Esto quiere decir que, para un motor de 4 polos, si se le suministra voltaje de corriente alterna (VAC) de 60 Hz, su velocidad será de 1,800 revoluciones por minuto (RPM).
¿Qué pasa si modificamos la frecuencia del voltaje suministrado, representado por la letra f? Supongamos que, usando un inversor de frecuencia, alteramos la frecuencia suministrada de 60Hz por una frecuencia de 30Hz; nos queda de la siguiente manera:
(120 × 30) / 4 = 900
Es decir, ¡acabamos de cambiar la velocidad rotacional del motor eléctrico de 4 polos de 1,800 RPM a 900 RPM!
Es decir, ahora la velocidad rotacional del motor eléctrico de 4 polos, en lugar de ser 180 RPM, es de 1,350 RPM.
¿Cómo funciona el inversor de frecuencia?
Primero, convierte el voltaje de corriente alterna en voltaje de corriente directa usando un puente rectificador. Posteriormente, usando transistores (IGBT) encienden y apagan la señal eléctrica de corriente directa en una secuencia específica, enviando pulsos al motor eléctrico generando una forma de onda cuadrada de voltaje de corriente directa con una frecuencia constante.
De esta manera, se simula la frecuencia y voltaje suministrado. Para modificar la velocidad del motor, se modifica la amplitud de los pulsos para simular una menor o mayor frecuencia, o Hz.
Entonces, si a un número constante de pulsos por segundo se les modifica la amplitud, la repetición del ciclo de pulsos en cada segundo va a ser menor, simulando una menor frecuencia. Si se reduce el ciclo se aumenta la frecuencia y si se aumenta el ciclo se reduce la frecuencia.
Esta es la manera en la que el inversor o variador tiene control de estas 2 variables que son voltaje y frecuencia, lo cual le da la capacidad de variar la velocidad del motor y además ahorrar ya que no suministra todo el voltaje cuando la carga no lo requiere.
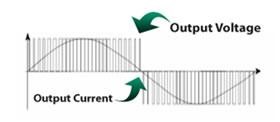
En la imagen anterior, la línea ondulada es el voltaje suministrado al inversor por la compañía generadora. Se observa como la corriente va alternando; esto sucede 60 veces por segundo. De ahí proviene su nombre: voltaje de corriente alterna. Las barras que se aprecian en la gráfica son los pulsos que manda el inversor al motor para simular la onda senoidal típica de corriente alterna. Si las barras son más angostas, la frecuencia será menor.
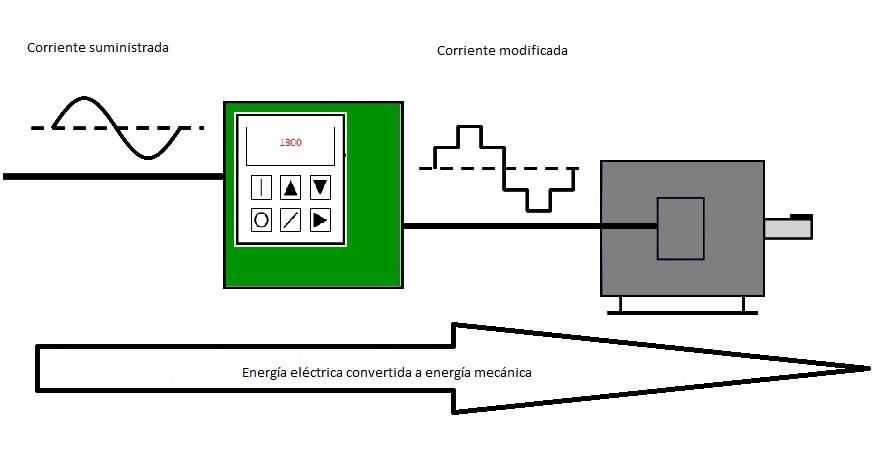
En la anterior gráfica se puede observar el drive en color verde, con su display que, en este caso muestra la velocidad del motor en RPM, botones de arranque/paro y control/programación; en color gris vemos el motor eléctrico. La corriente alterna entra en onda senoidal al inversor de frecuencia y, tras ser procesada por el drive, sale en corriente directa en pulsos hacia el motor, simulando la onda de la corriente alterna. La flecha indica cómo la energía eléctrica es convertida en energía mecánica al hacer girar al motor.
Tipos de inversores de frecuencia
A continuación analizamos los principales tipos de variadores de frecuencia que puedes encontrar en México y sus usos más habituales. Los inversores pueden ser de diversos tipos, dependiendo de la aplicación, del tipo de corriente o prestaciones que tenga el equipo.
De acuerdo con el voltaje de entrada
- Monofásico. Normalmente son para usos ligeros, y no son compatibles con motores de más de 5 HP debido al gran amperaje que estos consumen en 110 V.
- Trifásico. La gran mayoría de los drivers son para corriente trifásica, pues casi todas las instalaciones industriales funcionan con corriente trifásica.
- Baja tensión. Va desde 110 hasta 1,000 V.
- Media tensión. A partir de 1,000 hasta 7,200 V.
- Alta tensión. Voltajes superiores a 35,000 V
De acuerdo con la aplicación
- Torque variable. Algunos ejemplos de torque variable son para bombeo y ventilación, pues a bajas revoluciones el motor requiere poca potencia para mover el fluido y el requerimiento de potencia llega a su máximo a velocidad nominal.
- Torque constante. En este caso, el motor requiere el 100% de su torque/potencia desde 0 RPM. Un ejemplo puede ser un elevador, que desde que arranca el motor ya lleva el 100% de la carga. Otro ejemplo puede ser una trituradora, que, en ocasiones, puede ya estar cargada al momento del arranque, y necesita toda la potencia del motor para poder romper el material desde el arranque.
- Convertidor de frecuencia 60 a 50 Hz: imprescindible cuando se importa maquinaria europea y se requiere adaptar la alimentación eléctrica sin modificar el motor.
De acuerdo con las prestaciones o características
- Puede ser desde protocolos de comunicación, habilidad de aceptar tarjetas adicionales de comunicación o programación, que se pueda programar más funciones, etc.
Preguntas frecuentes sobre variadores e inversores
¿Cuál es el mejor variador de velocidad trifásico para mi proceso?
Elegir un variador de velocidad trifásico adecuado depende de la potencia, tipo de carga y entorno de trabajo.
¿Qué es exactamente un variador de velocidad motor?
Un variador de velocidad motor permite ajustar las RPM para optimizar el consumo energético y el rendimiento.
¿Existen soluciones de inversor de alta frecuencia?
Sí, un inversor de alta frecuencia está diseñado para aplicaciones especializadas que requieren conmutaciones rápidas.
¿Puedo usar un inversor variador de frecuencia en maquinaria antigua?
El inversor variador de frecuencia se adapta a equipos existentes, siempre que la tensión y la corriente sean compatibles.
Variador de velocidad precio: ¿qué factores influyen?
El variador de velocidad precio se define por capacidad de carga, funciones de control y grado de protección.
Comparativa variador de frecuencia trifásico precio vs. monofásico
El variador de frecuencia trifásico precio suele ser más competitivo en potencias medias y altas.
¿Qué es un inversor de frecuencia variable?
Un inversor de frecuencia variable permite cambiar hertz y voltaje de forma continua para lograr ahorro energético.
Aplicación de un variador de velocidad ventilador
Un variador de velocidad ventilador ajusta el caudal de aire y reduce el desgaste mecánico.
Variador de velocidad para motor trifásico de 3 HP
Para motores de 3 HP recomendamos un variador de velocidad para motor trifásico de 3 HP con protección IP55.
Variador de velocidad trifásico 5 HP para bombeo
El variador de velocidad trifásico 5 HP mantiene presión constante y previene golpes de ariete.
¿Se puede instalar un inversor de frecuencia 50/60 Hz?
Un inversor de frecuencia 50/60 Hz es ideal cuando se operan equipos diseñados para ambas frecuencias estándares.
Inversor de frecuencia para motor monofásico
Un inversor de frecuencia para motor monofásico resulta útil en talleres y pequeñas instalaciones donde no se dispone de alimentación trifásica.